1.þø©µ£║Ú£ÇÞªüÕô¬õ║øÕÅéµò░
Õàêþ£ïõ©ïÕø¥õ║åÞºúõ©Çõ©ïõ©èµ¼íµêæõ╗¼Õ╗║þ½ïþÜäþø©µ£║Õ£¿3Dõ©ûþòîõ©¡þÜäµäÅõ╣ë´╝Ü
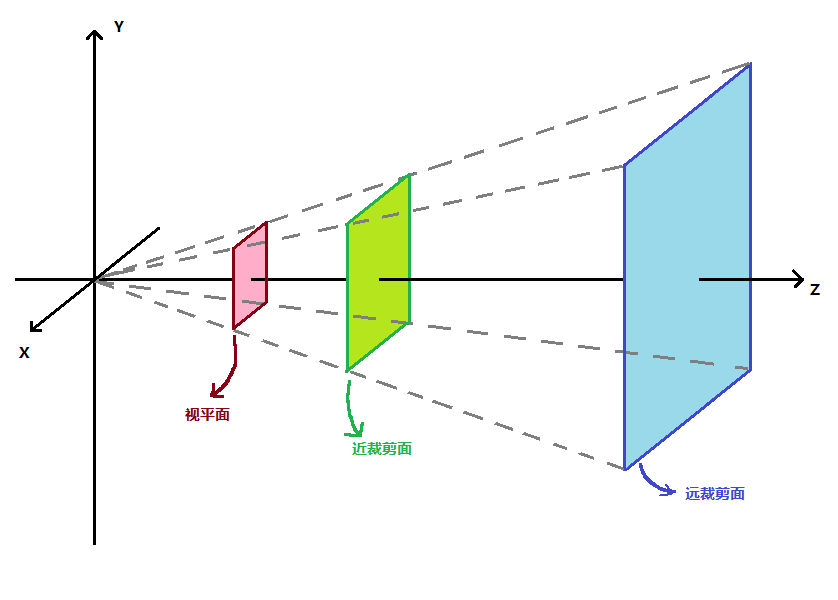
ÕªéHello3DWorldõ©¡õ╗ïþ╗ìþÜä´╝îÕ£¿þø©µ£║ÕØɵáçþ│╗õ©ï´╝îþø©µ£║µ£ØÕÉ浡úZÞ¢┤´╝îþø©µ£║µ£ëÞºåÚçÄÞºÆÕ║ª´╝îÕøáõ©║ÞºåÚçÄÞºÆÕ║ª´╝îÕ¢óµêÉõ║åõ©èÕø¥þÜäÞºåÚöÑõ¢ô´╝îÞºåÕ╣│ÚØóÕ░▒µÿ»ÞªüÞó½ÚÇÅÞºåµèòÕ¢▒Õê░þÜä2DÕ╣│ÚØóÒÇé
Õ£¿Þ┐ÖÕ╣àÕø¥ÚçîÕó×Õèáõ║åÞ┐æÞúüÕë¬ÚØóõ©ÄÞ┐£ÞúüÕë¬ÚØóÒÇéõ╗ûõ╗¼µÿ»ÕüÜõ╗Çõ╣êþÜäÕæó´╝ƒÕ£¿þÄ░Õ«×õ©¡´╝îµêæõ╗¼õ╝ÜÕÅæþÄ░´╝îþª╗þ£╝þØøÕñ¬Þ┐£þÜäõ©£ÞÑ┐µêæõ╗¼Õ░▒þ£ïõ©ìÕê░õ║å´╝îþª╗þ£╝þØøÕñ¬Þ┐æþÜäõ©£ÞÑ┐ÕÅêõ╝ܵîíõ¢ÅÕñºÚâ¿ÕêåµÖ»Þë▓ÒÇéõ║ĵÿ»Õ░▒Õ«Üõ╣ëõ║åÞ┐£ÞúüÕë¬ÚØóÕÆîÞ┐æÞúüÕë¬ÚØóÔÇöÔÇöµ»öÞ┐æÞúüÕë¬ÚØóÞ┐ÿÞ┐æþÜäþë®õ¢ôÕÆîµ»öÞ┐£ÞúüÕë¬ÚØóÞ┐ÿÞ┐£þÜäþë®õ¢ô´╝îµêæõ╗¼õ©ìµèèõ╗ûõ╗¼ÚÇÅÞºåÕê░ÞºåÕ╣│ÚØóõ©èÒÇéõ╗ûõ╗¼ÕÆîÞºåÕ╣│ÚØóÕ╣│Þíî´╝îõ╣ƒÕ░▒ÕÆîx-yÕ╣│ÚØóÕ╣│Þíî´╝îµëÇõ╗Ñõ╗ûõ╗¼þÜäÕ╣│ÚØóµû╣þ¿ïÕ░▒ÕêåÕê½µÿ»z = nearz ÕÆî z = farzÒÇé
Þ┐ÿµ£ëõ╗Çõ╣êþë®õ¢ôµêæõ╗¼õ╣ƒõ©ìÕüÜÚÇÅÞºåµèòÕ¢▒Õæó´╝ƒÕªéÕø¥ÕŻ޺ü´╝îÕ£¿ÞºåÚöÑõ¢ôõ╗ÑÕñûþÜäõ©£ÞÑ┐µêæõ╗¼õ╣ƒõ©ìÞªüÒÇéµëÇõ╗ÑÚÖñõ║åÞ┐£Þ┐æÞúüÕë¬ÚØó´╝îÕÅêµ£ëõ║åõ©èÒÇüõ©ïÒÇüÕÀªÒÇüÕÅ│ÞúüÕë¬ÚØóþÜäÕ«Üõ╣ëÒÇéÚÇÜÞ┐çÕêñµû¡þë®õ¢ôõ©ÄÞ┐Öõ║øÞúüÕë¬ÚØóþÜäÕà│þ│╗´╝îµêæõ╗¼ÕÅ»õ╗ÑÞ┐çµ╗ñµÄëÕñºÚçÅõ©ìÕÅ»Þâ¢Õç║þÄ░Õ£¿Õ▒ÅÕ╣òõ©¡þÜäþë®õ¢ô´╝îõ╗ÄÞÇîÚü┐ÕàìÕ»╣õ╗ûõ╗¼Þ┐øÞíîõ©Çþ│╗ÕêùþÜä3DµÁüµ░┤þ║┐ÕñäþÉå´╝îÞ┐ÖÕ»╣õ║ĵ©▓µƒô3Dõ©ûþòîõ©¡Õ║×ÕñºþÜäõ©ûþòîµØÑÞ»┤µÿ»Õ┐àÚí╗þÜäÒÇé
þÄ░Õ£¿µÇ╗þ╗ôõ©Çõ©ïHello3DWorldõ©¡µêæõ╗¼õ¢┐þö¿þÜäþø©µ£║ÕÅéµò░´╝îÕÆîþÄ░Õ£¿µêæõ╗¼µû░Õó×þÜä´╝îµ£ëÞ┐Öõ║ø´╝Üþø©µ£║þÜäÕ£¿õ©ûþòîõ©¡þÜäõ¢ìþ¢«WorldPosÒÇüþø©µ£║Õ£¿õ©ûþòîõ©¡þÜäµ£ØÕÉæDirection(ÚÇÜÞ┐çõ©Çµ¼íþ╗òX,Y,ZÞ¢┤µùïÞ¢¼þÜäÞºÆÕ║ªþí«Õ«Ü)ÒÇüÞ┐æÞúüÕë¬ÚØóþÜänearzÒÇüÞ┐£ÞúüÕë¬ÚØóþÜäfarzÒÇüÞºåÞÀØd(þø©µ£║Õê░ÞºåÕ╣│ÚØóþÜäÞÀØþª╗)ÒÇüÕ▒ÅÕ╣òþÜäÕ«¢Õ║ªÕÆîÚ½ÿÕ║ªÒÇüþø©µ£║þÜäÞºåÚçÄÞºÆÕ║ªÒÇé
ÕàÂõ©¡µ£ëÕçáõ©¬ÕÅéµò░´╝îõ╗ûõ╗¼þ£ïÞÁÀµØÑÕ¥êõ╣▒´╝ÜÞºåÞÀØdÒÇüÕ▒ÅÕ╣òþÜäÕ«¢Õ║ªÕÆîÚ½ÿÕ║ªÒÇüþø©µ£║þÜäÞºåÚçÄÞºÆÕ║ªÒÇéõ╗ûõ╗¼µÿ»þø©õ║Æõ¥ØÞÁûþÜä´╝îÚéúµêæõ╗¼Ú£ÇÞªüÞ¥ôÕàÑÕô¬õ║øÕÅéµò░´╝îÕÅêÚ£ÇÞªüþ«ùÕç║Õô¬õ║øÕÅéµò░´╝ƒµêæõ╗¼õ©Çիܵÿ»þƒÑÚüôÕ▒ÅÕ╣òþÜäÕ«¢Õ║ªÕÆîÚ½ÿÕ║ªþÜä´╝îÞ┐Öµÿ»õ©¬µ¡╗ÕÇ╝ÒÇéÕ»╣õ║Äþø©µ£║þÜäÞºåÚçÄÞºÆÕ║ª´╝îÕÅ»Þâ¢õ╝ܵá╣µì«µ©©µêÅþÜ䵃Éõ║øÕ£║µÖ»ÞÇîÕüÜÞªüµ▒é´╝îÞÇîµÿ»ÞºåÞÀØdÕêÖõ©ìÕñ¬þø┤Þºé´╝îµêæõ╗¼Õ¥êÚÜ¥Õøáõ©║µƒÉõ©¬µ©©µêÅÕ£║µÖ»ÞÇîÕÄ╗þø┤µÄÑÞ░âµò┤ÞºåÞÀØdÒÇéµëÇõ╗ѵêæõ╗¼Õ║öõ╗ÑÕ▒ÅÕ╣òþÜäÕ«¢Ú½ÿÕÆîÞºåÚçÄÞºÆÕ║ªFOVµØÑõ¢£õ©║Þ¥ôÕàÑÕÅéµò░´╝îþ«ùÕç║Þ┐ÖþºìµâàÕåÁõ©ïþÜäÞºåÞÀØdÕ║öõ©║ÕñÜÕ░æÒÇé
µ£ëõ║åÞ┐Öõ║øÕÅéµò░µêæõ╗¼Õ░▒ÕÅ»õ╗ѵ×äÕ╗║þ¼¼õ©Çþºìþø©µ£║µ¿íÕ×ïõ║å´╝îÕŽÕüܵ¼ºµïëþø©µ£║ÒÇéÕøáõ©║þø©µ£║þÜäµ£ØÕÉæµÿ»ÚÇÜÞ┐çµ¼ºµïëµùïÞ¢¼ÞºÆÕ║ª(þ╗òx,y,zÞ¢┤ÕêåÕê½Þ¢¼Õè¿þÜäÞºÆÕ║ª)µØÑÕå│Õ«ÜþÜäÒÇéÕàÂÕ«×Hello3DWorldþÜäþñ║õ¥ïÕ░▒µÿ»õ©Çõ©¬µ¼ºµïëþø©µ£║õ║å´╝îõ¢åµÿ»µêæõ╗¼µÿ»Þºäիܵ¡╗õ║åFOVõ©║90Õ║ª´╝îÞÇîõ©öõ╣ƒµ▓íµ£ëÕ╝òÕàÑÞúüÕë¬ÚØóþÜ䵪éÕ┐ÁÒÇé
2. UVNþø©µ£║þ│╗þ╗ƒ
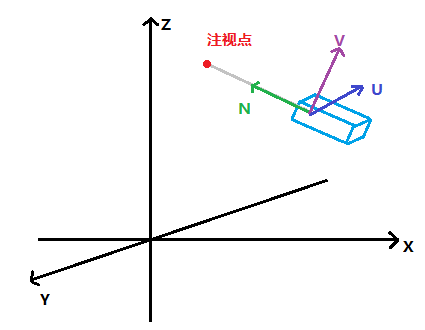
Þ┐ÿµ£ëõ©Çþºìþø©µ£║þ│╗þ╗ƒÕŽUVN´╝îõ╗ûÕÆîõ©èÚØóþÜäµ¼ºµïëþø©µ£║ÕŬµ£ëõ©Çþé╣Õî║Õê½´╝îÕ░▒µÿ»Õªéõ¢òÞí¿þñ║þø©µ£║þÜäµ£ØÕÉæÒÇéÕ«âõ¢┐þö¿õ©ëõ©¬þø©õ║ÆÕ×éþø┤þÜäÕÉæÚçŵØÑÞí¿þñ║þø©µ£║þÜäµ£ØÕÉæ´╝Ü
1) þø©µ£║µ│¿ÞºåþÜäÕÉæÚçÅN
2) þø©µ£║þÜäõ©èµû╣ÕÉæÕÉæÚçÅV
3) þø©µ£║þÜäÕÅ│µû╣ÕÉæÕÉæÚçÅU
Õªéõ©ïÕø¥´╝îµÿ»Õ£¿õ©ûþòîÕØɵáçþ│╗õ©ïþÜäUVNþø©µ£║þÜäÕÉæÚçÅÞí¿þñ║´╝Ü
UVNµØÑÞí¿þñ║µû╣ÕÉæµ£ëõ╗Çõ╣êÕÑ¢ÕñäÕæó´╝ƒÚªûÕàê´╝îµêæõ╗¼Õªéµ×£µâ│Þ«®þø©µ£║ÞÀƒÞ©¬µƒÉõ©¬þé╣µØѵïìµæäþÜä޻ش╝îÞ┐Öþºìµû╣Õ╝ŵùáþûæÞªüµ»öµ»Åµ¼íÕÄ╗Þ«íþ«ùµ¼ºµïëµùïÞ¢¼ÞºÆÕÑ¢Õ¥êÕñÜÒÇéµ»öÕªéþ¼¼õ©ëõ║║þº░ÞºåÞºÆþÜ䵩©µêÅ´╝îõ©ÇÞê¼Ú⢵ÿ»õ╗ÑþĮիÂõ©║µ│¿Þºåþé╣ÒÇéµâ│Þ▒íõ©Çõ©ïÕ»╣õ║ÄÞ┐ÖþºìµâàÕåÁ´╝îÞâ¢ÕñƒÕ¥êþø┤ÞºéþÜäµâ│Õê░ÕÄ╗Þ¢¼ÕñÜÕ░æµ¼ºµïëÞºÆÕ║ªÕÉùÒÇéÒÇéÒÇé
Þ┐ÖÚçîµ£ëÕçáþé╣ÚØ×Õ©©ÕÇ╝Õ¥ùµ│¿µäÅ´╝Ü
1) Õªéµ×£µêæõ╗¼µ£ëõ║åµ│¿Þºåþé╣´╝îÚÇÜÞ┐çþö¿µ│¿Þºåþé╣ÕØɵáçÕçÅÕÄ╗þø©µ£║õ©ûþòîÕØɵáç´╝îÕ░▒ÕÅ»õ╗ѵ▒éÕ¥ùNÒÇé(Õ░ܵ£¬Õ¢Æõ©ÇÕîûþÜä)
2)Õªéµ×£µêæõ╗¼ÕÀ▓þƒÑõ©èÕÉæÚçÅV´╝îÚéúõ╣êÕ░▒ÕÅ»õ╗ÑÚÇÜÞ┐çN├ùVµ▒éÕ¥ùÕÅ│ÕÉæÚçÅUÒÇé
3) µêæõ╗¼Õªéµ×£µèèõ©èÕÉæÚçÅVÚÇÜÞ┐çþø┤ÞºÆõ©ëÞºÆÕ¢óÕêåÞºúµêÉÕ£¿nvÕ╣│ÚØóÕÆîuvÕ╣│ÚØóõ©èþÜäõ©ñõ©¬ÕêåÚçÅþÜä޻ش╝îÕÅ»õ╗ÑÕÅæþÄ░Õ£¿nvÕ╣│ÚØóõ©èþÜäÕêåÚçŵ▓íµ£ëµäÅõ╣ë´╝îÕøáõ©║þø©µ£║õ╗░Õñ┤µêûõ¢ÄÕñ┤þÜäµû╣ÕÉæÕÀ▓þ╗Åþö▒ÕÉæÚçÅNµØÑÕå│Õ«Üõ║åÒÇéµëÇõ╗ÑÕ«×Þ┤¿õ©èÕÉæÚçÅVµÿ»Õå│Õ«Üþø©µ£║µÿ»ÕɪÕÇ¥µû£þÜä´╝îµëÇÞ░ôþÜäÕÇ¥µû£µÿ»µîçÞ«®ÕÀªÞÇ│ÚØáÕÉæÞé®Úâ¿þÜäÕè¿õ¢£´╝îÞÇîõ©ìµÿ»Õñ┤Úâ¿ÕÉæÕÀªÞ¢¼Õñ┤þÜäÕè¿õ¢£ÒÇé
4) ÞÇîõ©öÕì│õ¢┐þ╗ÖÕ«ÜþÜäõ©èÕÉæÚçÅVõ©ÄÕÉæÚçÅNõ©ìÕ×éþø┤´╝îõ╣ƒÕÅ»õ╗ѵá╣µì«N├ùVµ▒éÕ¥ùU´╝îÕøáõ©║NÕÆîVÕÅ»õ╗ѵ×äµêÉõ©Çõ©¬Õ╣│ÚØóõ║å´╝îÞç¬þäÂÕÅ»õ╗ѵ▒éÕàµ│òÕÉæÚçÅÒÇéþäÂÕÉÄÕåìÚÇÜÞ┐çU├ùNÕÅìµ▒éV´╝îÞÇîÞ┐Öõ©¬VÕêÖµÿ»Õ×éþø┤õ║ÄUÕÆîNþÜäþ£ƒµ¡úþÜäV´╝îÕàÂÕ«×õ╣ƒÕ░▒µÿ»nvÕ╣│ÚØóõ©èþÜäÕêåÚçÅõ©║0þÜäVõ║åÒÇé
3. Õ«Üõ╣ëþø©µ£║þ╗ôµ×ä
Ú⢵£ëµ│¿Úçè´╝îµ▓íÕòÑÕÑ¢Þ»┤þÜäõ║å´╝îÚ⢵ÿ»õ©èÚØóõ╗ïþ╗ìþÜäÕÅéµò░´╝îµ£ÇÕÉĵ£ë3õ©¬þƒ®ÚÿÁþ╝ôÕ¡ÿÕÅÿµìóþƒ®ÚÿÁÒÇé
4. ÕêøÕ╗║þø©µ£║Õ╣ÂÞ«íþ«ùÚ£ÇÞªüÞ«íþ«ùþÜäþø©µ£║ÕÅéµò░
ÕêøÕ╗║þø©µ£║þÜäÕ碵ò░ÚÖñõ║åµèèÕÅéµò░ÞÁïÕÇ╝Õñû´╝îÞªüÞ«íþ«ùõ©ïÕêùõ©£ÞÑ┐´╝ÜÕ«¢Ú½ÿµ»öÒÇüÞºåÞÀØÒÇüÕÉäÞúüÕë¬ÚØóÒÇé
1) µ▒éÕ«¢Ú½ÿµ»ö
Õ░▒µÿ»Õ▒ÅÕ╣òÕ«¢ÚÖñõ╗ÑÚ½ÿÒÇéÒÇéÒÇé
cam->AspectRatio = (double)screenWidth / (double)screenHeight;
2) µ▒éÞºåÞÀØ
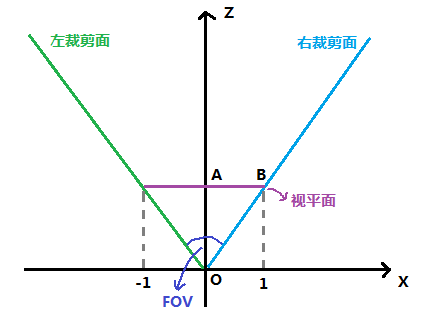
µ▒éÞºåÞÀØOAÕ¥êþ«ÇÕìò´╝îÕÀ▓þƒÑÞºåÕ╣│ÚØóÕ«¢Õ║ªõ©║2´╝îµëÇõ╗ÑAB=1ÒÇé
tan(FOV/2) = AB : AO
µëÇõ╗Ñ´╝îAO = AB / tan(FOV/2)
3) µ▒éÕÉäÞúüÕë¬ÚØó
µêæõ╗¼þƒÑÚüôÕÅ»õ╗Ñþö¿Õ╣│ÚØóõ©èõ©Çþé╣ÕÆîÕ╣│ÚØóþÜäµ│òÕÉæÚçŵØÑÞí¿þñ║Õ╣│ÚØó´╝îÕøáõ©║µëǵ£ëþÜäÞúüÕë¬ÚØóÚâ¢Þ┐çÕăþé╣O´╝îµëÇõ╗ÑÕŬުüµë¥Õê░µ│òÕÉæÚçÅÕì│ÕÅ»ÒÇéµë¥µ│òÕÉæÚçŵ£Çþ«ÇÕìòþÜäµû╣µ│òÕ░▒µÿ»Õ£¿Õ╣│ÚØóõ©èµë¥Õê░ÕŪÕñûõ©ñõ©¬þé╣´╝îþäÂÕÉÄÕ░▒Þ┐Öõ©ñõ©¬þé╣þÜäÕÅëõ╣ÿ´╝îÕ░▒ÕÅ»õ╗ÑÕ¥ùÕê░µ│òÕÉæÚçÅÒÇéµë¥Õô¬õ©ñõ©¬þé╣Õæó´╝ƒþ£ïõ©ïÕø¥´╝îµÿ»µë¥ÕÅ│ÞúüÕë¬ÚØóõ©èþÜäÕŪÕñûõ©ñþé╣´╝îÞ┐Öõ©ñõ©¬þé╣þ£ƒþꢴ╝Ü
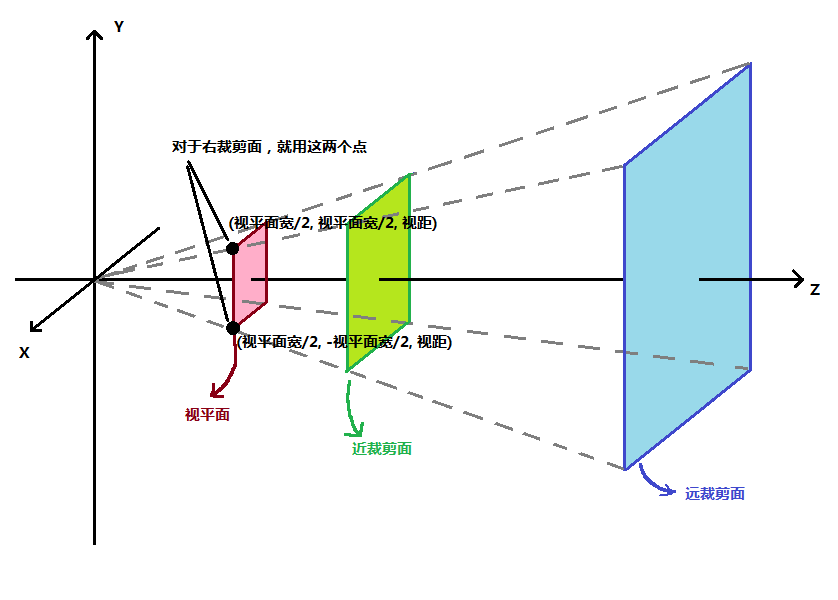
ÕåìÕñìõ╣áõ©ÇÚüìÕÅëõ╣ÿÕà¼Õ╝ÅÕɺ´╝Üu├ùv = <uy*vz - vy*uz, -ux*vz + vx*uz , ux*vy - vx*uy>
µèèõ©èÚØóþÜäõ©ñþé╣ÕêåÕê½õ¢£õ©║uÕÆîvõ╗úÕàÑ´╝Ü<w*d / 2 + w*d / 2, -w*d / 2 + w*d / 2 ,-w*w /4 - w*w / 4>
Þ«íþ«ùõ©Çõ©ï´╝Ü<w*d , 0 , - w*w>´╝îµêæõ╗¼ÕÅ»õ╗ѵèèÕÉäÕêåÚçÅþ╝®µö¥1/w´╝îÕ¥ù´╝Ü<d, 0, -w/2>
ÕæÁÕæÁ´╝îµ│òÕÉæÚçÅÕ░▒µÉ×Õ«Üõ║åÒÇé
õ©ïÚØóþÜäÕ碵ò░´╝îÞ┤ƒÞ┤úÕí½ÕààCameraþÜäÕÅéµò░´╝îÕ╣Âõ©öÞ«íþ«ùõ©èÚØóÞ┐Öõ©ëõ©¬ÕÅéµò░´╝Ü
5. Þ«íþ«ùþø©µ£║ÕÅÿµìóþƒ®ÚÿÁÕ╣Âþ╝ôÕ¡ÿ
µ¼ºµïëþø©µ£║þÜäÕÅÿµìóþƒ®ÚÿÁÕ£¿Hello3DWorldÕÀ▓þ╗ÅÞ»┤þÜäÕñƒÕñÜõ║å´╝îÕ░▒µÿ»Õ╣│þº╗+µùïÞ¢¼´╝îõ¢åµÿ»õ¢ìþº╗ÕÆîÞºÆÕ║ªÚ⢵ÿ»ÕÆîþë®õ¢ôÕÅÿµìóþø©ÕÅìÞÇîÕÀ▓ÒÇéõ©ïÚØóõ╗ïþ╗ìõ©ïUVNþø©µ£║þÜäÕÅÿµìóþƒ®ÚÿÁÒÇé
Õ╣│þº╗µÿ»Þé»Õ«ÜÞªüÕüÜþÜä´╝îÞ┐Öõ©¬õ©ìÕåìÕñÜÞ»┤õ║å´╝îÞ»┤Þ»┤Õ╣│þº╗õ╣ïÕÉÄ´╝îµêæõ╗¼þÜäÕÅÿµìóþƒ®ÚÿÁµÿ»õ╗Çõ╣êÕæó´╝ƒÕåìþ£ïõ©Çµ¼íUVNþø©µ£║þÜäþñ║µäÅÕø¥´╝Ü
UÒÇüVÒÇüNõ║Æþø©Õ×éþø┤´╝îÞ┐Öõ©ìÕ░▒µÿ»õ©¬ÕØɵáçþ│╗õ╣ê´╝ƒÞ┐ÿÞ«░Õ¥ùõ©èµ¼íÞïìõ║òþ®║µòÖþ╗ÖÕÆ▒õ╗¼Õªéõ¢òµÄ¿Õç║ÕÅÿµìóþƒ®ÚÿÁõ╣ê´╝îÕ░▒µÿ»µë¥X,Y,ZÞ¢┤õ¢£õ©║µôìõ¢£µƒä´╝îÕªéõ¢òÕÅÿµìóµêɵû░þÜäÕØɵá絃äÒÇé
Þ«¥Õƒ║ÕÉæÚçÅ<1,0,0> <0,1,0> <0,0,1>õ©║õ©ûþòîÕØɵáçþ│╗õ©ëõ©¬ÕØɵáçÞ¢┤ÕÉæÚçÅ´╝îÕøáõ©║þø©µ£║þ│╗þÜäþø©µ£║µ£ØÕÉæõ©║Zµ¡úµû╣ÕÉæ´╝îµëÇõ╗ÑÕÅÿµìóÕ»╣Õ║öÕà│þ│╗õ©║´╝Ü
XÞ¢┤->U
YÞ¢┤->V
ZÞ¢┤->N
µëÇõ╗ÑÕÅÿµìóþƒ®ÚÿÁþÜäXÕêåÚçÅõ©║<Ux, Uy, Uz>ÒÇé
ÕÉîþÉå´╝îYÕêåÚçÅ<Vx, Vy, Vz>ÒÇéZÕêåÚçÅ<Nx, Ny, Nz>ÒÇé
µëÇõ╗ÑUVNþÜäÕÅÿµìóþƒ®ÚÿÁõ©║(õ©ìÕîàµï¼Õ╣│þº╗)´╝Ü
[ Ux Uy Uz ]
[ Vx Vy Vz ]
[ Nx Ny Nz ]
µëÇõ╗ÑÕÅ»õ╗ÑÕåÖÕç║õ©ïÚØóþÜäþø©µ£║ÕÅÿµìóþƒ®ÚÿÁµø┤µû░Õ碵ò░´╝Ü
6. µ¼ºµïëµùïÞ¢¼ÞºÆÞ¢¼UVN
µ£ëõ©ÇþºìÚØ×Õ©©Õ©©ÞºüþÜäþö¿µ│ò´╝îÕ░▒µÿ»þø©µ£║ÕŬþƒÑÚüôÕêØÕºïþÜäµ£ØÕÉæ´╝îÕ╣Âõ©öµÿ»µ¼ºµïëµùïÞ¢¼ÞºÆÞí¿þñ║þÜäÒÇéõ¢åµêæõ╗¼Þ┐ÿÕ©îµ£øõ¢┐þö¿UVNþ│╗þ╗ƒþÜäþø©µ£║´╝îÚéúõ╣êÕ░▒Ú£ÇÞªüµèèµ¼ºµïëþø©µ£║µ£ØÕÉæÞ«íþ«ùÕç║UVN´╝îÞ┐ÖµáÀþø©µ£║Õ░▒ÕÅÿµêÉUVNþø©µ£║õ║åÒÇé
ÞªüÕüÜÞ┐Öõ©¬Þ¢¼µìó´╝îÕàÂÕ«×Õ░▒µÿ»Þªüµ▒éÕ¥ùþø«µáçµ│¿Þºåþé╣þÜäÕØɵáç´╝îÞ┐ÖÚçîÞªüÕ║öþö¿þÉâÚØóÕØɵáçþ│╗Þ¢¼þ¼øÕìíÕ░öÕØɵáçþ│╗þÜäµÇºÞ┤¿µØÑÕ«îµêÉõ║åÒÇéµêæõ╗¼ÕàêÕüçÞ«¥µ│¿Þºåþø«µáçþé╣Õ£¿þé╣P´╝îµêæõ╗¼þö¿þÉâÚØóÕØɵáçþ│╗µØÑÞí¿þñ║Þ┐Öõ©¬þé╣P(p, phi, theta)´╝Ü
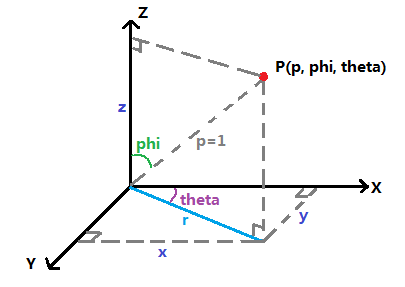
Õªéµ×£µé¿Õ»╣þÉâÚØóÕØɵáçþ│╗Þ┐ÿµ£ëÕì░Þ▒íþÜä޻ش╝îÕÅ»õ╗ÑÕÅæþÄ░ÕàÂÕ«×þÉâÚØóÕØɵáçõ©¡þÜäphiÕ░▒µÿ»µ¼ºµïëµùïÞ¢¼ÞºÆõ©¡þÜäþ╗òYÞ¢┤µùïÞ¢¼þÜäÞºÆÕ║ª´╝îthetaÕ░▒µÿ»þ╗òZÞ¢┤µùïÞ¢¼þÜäÞºÆÕ║ªÒÇéµëÇõ╗Ñ´╝Ü
phi = cam->Direction.y;
theta = cam->Direction.z;
µêæÞç¬Þ«ñõ©║Þ┐Öõ©¬Õø¥þö╗þÜäþ½ïõ¢ôµòêµ×£Õ¥êÕ╝║Õôê´╝îÞÇîõ©öÚçìÞªüþÜäþø┤ÞºÆÚ⢵áçÕç║µØÑõ║åÒÇé
Õøáõ©║µêæõ╗¼ÕŬÕà│þ│╗µ£ØÕÉæõ©ìÕà│þ│╗Úò┐Õ║ª´╝îµëÇõ╗ѵêæõ╗¼Þ«¥Þ┐Öõ©¬þÉâÚØóÕØɵáçþÜäpõ©║1ÒÇé
µëÇõ╗ÑÕÅ»õ╗ÑÚØ×Õ©©Õ«╣µÿôµÄ¿Õ¥ù´╝Ü
r = sin(phi)
x = cos(theta) * r
y = sin(theta) * r
z = cos(phi)
Õøáõ©║µêæõ╗¼ÕŬÕà│þ│╗µ£ØÕÉæõ©ìÕà│þ│╗Úò┐Õ║ª´╝îµëÇõ╗ѵêæõ╗¼Þ«¥Þ┐Öõ©¬þÉâÚØóÕØɵáçþÜäpõ©║1ÒÇé
ÕÑ¢õ║å´╝îõ©çõ║ïõ┐▒Õñç´╝îþÄ░Õ£¿Õ«×þÄ░õ©Çõ©¬µ»öÞ¥âÕ«îÕûäþÜäµø┤µû░þ╝ôÕ¡ÿþƒ®ÚÿÁþÜäÕ碵ò░´╝Ü
ÚÇÜÞ┐çtypeÕêñµû¡µÿ»þ╝ôÕ¡ÿµ¼ºµïëÕÅÿµìóþƒ®ÚÿÁÞ┐ÿµÿ»UVNÕÅÿµìóþƒ®ÚÿÁ´╝îÕªéµ×£µÿ»UVNÕÅÿµìó´╝îÞ┐ÿÞªüÕêñµû¡UVNTargetNeedComputeþÜäÕÇ╝´╝îµØÑÕå│իܵÿ»ÕɪÕ░åµ¼ºµïëÞºÆÕ║ªÞ¢¼ÕÅÿõ©║µ│¿ÞºåÕÉæÚçÅ´╝îÕɪÕêÖþø┤µÄÑõ¢┐þö¿þ╗ôµ×äõ¢ôÕ¡ÿµö¥þÜäTargetÕÉæÚçÅÒÇéÕê½þÜäÕ░▒õ©ìþö¿ÕñÜÞ»┤õ║åÒÇé
7. õ╗úþáüõ©ïÞ¢¢
Þ┐Öµ¼íµ▓íµ£ëÕñܵ╝öþñ║DEMOÕüÜõ╗Çõ╣êµø┤µû░´╝îõ¢åµÿ»Õøáõ©║õ¢┐þö¿µ»öÞ¥âÕ«îÕûäþÜäþø©µ£║þ│╗þ╗ƒ´╝îµëÇõ╗ÑÕÀ▓þ╗ÅÕÅ»õ╗ѵö»µîüÚÜŵäÅþÜäµôìþ║Áþø©µ£║õ║åÒÇé
Õ«îµò┤Úí╣þø«õ╗úþáüõ©ïÞ¢¢´╝Ü>>þé╣Õç╗Þ┐øÕàÑõ©ïÞ¢¢ÚíÁ<<
8. ÞíÑÕààÞ»┤µÿÄ
Þ┐Öþ»çµûçþ½áþÜäþƒÑÞ»åþö¿þÜäµ»öÞ¥âÕñÜ´╝îµêæÕ¡ªõ╣áõ║åÕÑ¢Õçáµ£¼õ╣ª´╝îÕªéÒÇè3Dµò░Õ¡ªÕƒ║þíÇ:Õø¥Õ¢óõ©Äµ©©µêÅÕ╝ÇÕÅæÒÇïÒÇéþ╗ôµ×£ÕÅæþÄ░µ£ëõ©Çµ£¼õ╣ªõ©¡Õ¡ÿõ©ìÕ░æþÜäÞ»┤µ│òÚöÖÞ»»ÕÆîÚù«Úóÿ´╝îÕ░▒µÿ»ÒÇè3Dµ©©µêÅþ╝ûþ¿ïÕñºÕ©êµèÇÕÀºÒÇïÞ┐Öµ£¼´╝îµ£ëõ©Çõ║øÕÅ»Þ⢵ÿ»þ┐╗Þ»æµ░┤Õ╣│Úù«Úóÿ´╝îÞ┐ÿµ£ëõ©Çõ║øÕàëþøÿµ║Éþáüõ╣ƒµ£ëþÜäÚù«Úóÿ´╝îÞ┐ÖÚçîµîçÕç║õ©Çõ©ïÒÇé
1) µ▒éÞºåÞÀØ´╝îÞ»Ñõ╣ªþ╗ÖÕç║þÜäµÄ¿Õ»╝Õà¼Õ╝ÅÕÆîõ╗úþáüõ©║ d = (0.5) * (cam->viewplane_width) * tan_fov_div2
ÞÇîÕ«×ÚÖàµÄ¿Õ»╝þÜäþ╗ôµ×£Õªéµ×£þö¿Þ┐Öõ║øÕÅÿÚçŵØÑÞí¿þñ║ÕêÖÕ║öÞ»Ñõ©║ d = (0.5) * (cam->viewplane_width)/ tan_fov_div2ÒÇé
õ©ìþƒÑÚüôõ©║õ╗Çõ╣êõ╝Üþè»Þ┐ÖþºìÚöÖÞ»»´╝îÕàÀõ¢ôµÄ¿Õ»╝Þ┐çþ¿ïÕ£¿õ©èÚØóþÜäþ¼¼4Õ░ÅÞèéõ©¡ÒÇé
2) þ╗ÖÕç║UVNþƒ®ÚÿÁ´╝îõ¢£ÞÇàÞ»┤µÿ»þö¿õ╗Çõ╣êÕà▒þ║┐þ¿ïÕ║ªµØѵĿջ╝´╝îõ¢åÕÅêµ▓íþ╗ÖÕç║µÄ¿Õ»╝Þ┐çþ¿ï´╝îÞÇîÕ«×ÚÖàÕăþÉåÕ░▒µÿ»Õê®þö¿ÕÅÿµìóþƒ®ÚÿÁþÜäÕÉäÕÉæÚçÅþÜäÕçáõ¢òµäÅõ╣ëµëÇÕüÜþÜäÕØɵáçÞ¢┤þÜäÞ¢¼µìóÒÇé
3) µ▒éUVNÕÅÿµìóþƒ®ÚÿÁ´╝îõ¢£ÞÇàÕ░åVÕåÖµ¡╗õ©║<0,1,0>´╝îÞÇîÕ£¿Õ«×ÚÖàÕ║öþö¿õ©¡´╝îÕÅ»Þâ¢ÞªüÕüÜÕÇ¥µû£þø©µ£║þÜäµôìõ¢£´╝îµëÇõ╗Ñõ©ìÕ║öÞ»ÑÕåÖµ¡╗´╝îÞÇîµÿ»ÕàüÞ«©Þ░âþö¿ÞÇàµîçÕ«ÜÒÇéÕɪÕêÖµêæõ╗¼þÜäÚçæÕ¡ùÕíöþñ║õ¥ï´╝îÕªéµ×£µèèþø©µ£║µæåÕ£¿xÞ¢┤õ©èÚØóþÜä޻ش╝îÚçæÕ¡ùÕíöµ░©Þ┐£Ú⢵ÿ»ÕÇÆþÜäÒÇéÞÇîõ©öõ╣ƒµ▓íµ£ëÞ»┤µÿÄõ©║õ╗Çõ╣êÞªüÕÅìµ▒éV´╝îÞÇîÕăÕøáÕ░▒µÿ»õ╝áÕàÑþÜäVÕÅ»Þâ¢õ©ÄNõ©ìÕ×éþø┤ÒÇé
4) õ©èÒÇüõ©ïÒÇüÕÀªÒÇüÕÅ│ÞúüÕë¬ÚØóþÜäµ×äÕ╗║ÒÇéõ¢£ÞÇàÞ»┤ÔÇ£ÚªûÕàêÞ«íþ«ùÞí¿þñ║ÞúüÕë¬ÚØóÕ£¿Õ╣│ÚØóX-ZÕÆîY-Zõ©èþÜä2DµèòÕ¢▒ÕÉæÚçÅÔǪÔǪÔÇØÒÇéþäÂÞÇî´╝îÚªûÕàêÞ┐Öõ©¬µèòÕ¢▒Õ░▒õ©ìõ©Çիܵÿ»õ©¬þ║┐´╝îµ»öÕªéÕ»╣õ║ÄÕÅ│ÞúüÕë¬ÚØó´╝îÕ£¿Y-Zõ©èþÜäµèòÕ¢▒´╝îÕ░▒µÿ»Y-ZÕ╣│ÚØó´╝îµá╣µ£¼µùáµ│òõ¢┐þö¿ÒÇéÞÇîÕ«×ÚÖàÕŬުüµë¥Õ¥êþë╣µ«èþÜäõ©ñõ©¬þé╣Õì│ÕÅ»´╝îÕ░▒µÿ»õ©èÚØó4-3µëÇÞ»┤þÜäÚéúõ©ñõ©¬þé╣ÒÇé
µ£ÇÕÉÄ´╝îÒÇè3Dµ©©µêÅþ╝ûþ¿ïÕñºÕ©êµèÇÕÀºÒÇïÞ┐Öõ╣ªµÇØÞÀ»Õ¥êÕÑ¢´╝îõ¢åõ╣ƒµ£ëÕ¥êÕñܵĿջ╝µ£ëÚù«Úóÿ´╝îµëÇõ╗ÑÕ¡ªõ╣ᵡñõ╣ªþÜäµ£ïÕÅïõ©ÇÕ«ÜÞªüÕ░ÅÕ┐â´╝îõ©ÇÕ«ÜÞªüÞç¬ÕÀ▒õ║▓Þ笵Ŀջ╝õ©ÇÚüìÒÇéµ»öÕªéõ©èÚØóþÜäµ¼ºµïëÞ¢¼UVN´╝îõ╗ûÚØ×Þªüõ¢┐þö¿µƒÉõ©¬ÕÅ│µëïÕØɵáçþ│╗µØѵĿ´╝îÞÇîÕ«×ÚÖàµêæÕ£¿þø©µ£║ÕØɵáçþ│╗õ©ïþø┤µÄѵĿջ╝´╝îÕêÖµø┤Õèáþø┤ÞºéÒÇé
Õêåõ║½Õê░´╝Ü





þø©Õà│µÄ¿ÞìÉ
3DÕø¥Õ¢óÕ║ôµ¼ºµïëõ©ÄUVNþø©µ£║þñ║õ¥ïµ║Éõ╗úþáü µö»µîüµ¼ºµïëõ©ÄUVNþø©µ£║ µö»µîüõ║ÆÞ¢¼
µ¼ºµïëµôìõ¢£þ│╗þ╗ƒPXEÕ«ëÞúàþ│╗þ╗ƒ
Þ┐ÖÚçîõ╗ѵ×äÕ╗║õ©Çõ©¬Õ║ªÕà¿Úâ¿þø©ÕÉîþÜäµ¼ºµïëÕø×ÞÀ»´╝îÕ╣ÂÞ¥ôÕç║µ¼ºµïëÕø×ÞÀ»þÜäÞÀ»Õ¥ä 1.µ×äÕ╗║µ¼ºµïëÕø×ÞÀ» Þ┐×ÚÇÜõ©╗Þªüµÿ»ÚØáµáæµØÑõ┐ØÞ»ü´╝îÚªûÕàêÕ╗║þ½ïõ©Çõ©¬Õ║ªõ©║kþÜäÕ«îÕà¿Õø¥´╝îÕàÂõ©¡õ╝ܵ£ëÕ¥êÕñÜÚ£ÇÞªüõ©╗ÞªüþÜäÕ£░µû╣ ´╝ê1´╝ëÚªûÕàêµ×äÚÇáµáæ =>õ┐ØÞ»üÚíÂþé╣Þ┐×ÚÇÜ ´╝ê2´╝ëÕ░åÕ║ªþÜäþé╣...
µ¼ºµïëþ│╗þ╗ƒÕ«ëÞúàoracle 11g
ÚçîÚØóÕɽµ£ëµ¼ºµïëµû╣µ│ò´╝ܵ¼ºµïëµû╣µ│ò´╝ÜþÜäMATLABþ¿ïÕ║Å þ╗ÅÞ┐çõ║åmatlab þÜäÚ¬îÞ»ü þ╗ØÕ»╣µÿ»Õ»╣þÜä Þ»ÀÕñºÕ«Âµö¥Õ┐âõ©ïÞ¢¢
ÚÇÜÞ┐çµ£¼µ¼íÕ«×Ú¬î´╝îþ僵éëµ▒éÞºúÕ©©Õ¥«Õêåµû╣þ¿ïÕêØÕÇ╝Úù«ÚóÿþÜäµ£ëÕà│µû╣µ│òÕÆîþÉåÞ«║´╝îõ©╗Þªüµÿ»µ¼ºµïëµ│òÒÇüµö╣Þ┐øµ¼ºµïëµ│òÒÇüÕøøÚÿÂÚ¥Öµá╝Õ║ôÕíöµ│ò´╝îÕ¡ªõ╝Üþ╝ûÕêÂÞ┐Öõ©ñþºìµû╣µ│òþÜäÞ«íþ«ùþ¿ïÕ║ÅÒÇéõ¢ôõ╝ÜÞ┐Öõ©ñþºìÞºúµ│òþÜäÕèƒÞâ¢ÒÇüõ╝ÿþ╝║þé╣ÕÅèÚÇéþö¿Õ£║ÕÉêÒÇé ÞºúÕêØÕÇ╝Úù«Úóÿ´╝îÕ╣ÂÕ£¿Õ▒ÅÕ╣òõ©èµîëÚÇéÕ¢ô...
Õê®þö¿µ¼ºµïëÕà¼Õ╝Å´╝îµö╣Þ┐øµ¼ºµïëÕà¼Õ╝ŵØѵ▒éÕ¥«Õêå´╝îÕ¥«Õêåµû╣þ¿ïÕÅ»õ╗ѵø┤µö╣´╝îÕî║Úù┤þ▓¥þí«Õ║ªÕÅ»õ╗ѵá╣µì«Ú£Çµ▒éÞ¥ôÕàÑ
þë╣Õ¥üµÅÉÕÅûÞ«íþ«ùÕø¥ÕâÅõ©¡þÜäµ¼ºµïëµò░-þë╣Õ¥üµÅÉÕÅû.rar þ¿ïÕ║Åõ╗úþáüÞ»┤µÿÄ P0502´╝ÜÞ«íþ«ùÕø¥ÕâÅõ©¡þÜäµ¼ºµïëµò░
µö╣Þ┐øþÜäµ¼ºµïëÕ«ÜþÉåþö¿cÕ«×þÄ░
µ┤øõ╝ªÕà╣µÀÀµ▓îþ│╗þ╗ƒþÜäFPGAÕ«×þÄ░´╝êµö╣Þ┐øþÜäµ¼ºµïëþ«ùµ│ò´╝ë,µ£ëÞ»ªþ╗åþÜäverilogõ╗úþáü´╝îÞíîõ©║þ║ºÕ«×þÄ░´╝îõ©ëõ©¬Þ¥ôÕç║ÒÇéµ£ëõ©ìµçéþÜäÕÅ»õ╗ÑÞüöþ│╗ÒÇé
Þ«íþ«ùµ£║Þíîõ©ÜÕæ¿Þºéþé╣´╝ÜÚ©┐ÞÆÖ+µ¼ºµïë´╝îÕø¢õ║ºÕƒ║þíÇÞ¢»õ╗ÂÕ┤øÞÁÀ.pdf
MATLABµ║Éþ¿ïÕ║Åõ╗úþáüÕêåõ║½´╝ÜMATLABÕ«×þÄ░µ¼ºµïëµ│òµ▒éÞºúÕ©©Õ¥«Õêåµû╣þ¿ïþ╗ä
[Þ«íþ«ùµû╣µ│òõ¢£õ©Ü]Õê®þö¿pythonõ©¡matplotlibÕ«×þÄ░þ╗ÿÕêµ¼ºµïëµ│òÒÇüµö╣Þ┐øµ¼ºµïëµ│òÒÇüÕøøÚÿÂÚ¥Öµá╝-Õ║ôÕíöµ│òÕø¥ÕâÅ,Õê®þö¿µ¼ºµïëµ│òÒÇüµö╣Þ┐øµ¼ºµïëµ│òÒÇüÕøøÚÿÂÚ¥Öµá╝-Õ║ôÕíöµ│òÕ«×þÄ░Õ¥«Õêåµû╣þ¿ï´╝îþö¿pythonõ©¡þÜämatplotlibÕ║ôÕ«×þÄ░Õø¥ÕâÅþÜäþ╗ÿÕêÂ
Þ«íþ«ùÕø¥ÕâÅõ©¡þÜäµ¼ºµïëµò░matlabþ¿ïÕ║Å´╝îÕÅ»õ╗ѵû╣õ¥┐þÜäÕ¥ùÕç║þ╗ôµ×£
open Euler µ¼ºµïëµôìõ¢£þ│╗þ╗ƒþöƒµÇüÞ»ªÞºú.pptx
matlabÕ«×þÄ░µ¼ºµïëµá╝Õ╝ÅÕÆîµó»Õ¢óµá╝Õ╝ŵ▒éÞºú.doc
Õ¥«Õêåµû╣þ¿ïÕ©©þö¿þÜäõ©ñþºìµò░ÕÇ╝Þºúµ│ò´╝ܵ¼ºµïëµû╣µ│òÕÆîÚ¥Öµá╝Õ║ôÕíöµ│ò.doc
µ¼ºµïëµû╣µ│òõ╗ÑÕÅèµö╣Þ┐øþÜäµ¼ºµïëµû╣µ│òþÜämatlabÕ«×þÄ░´╝îÕ©îµ£øµ£ëþö¿
Õ«×Ú¬î_38_Õªéõ¢òµ×äÕ╗║µ¼ºµïëÕø×ÞÀ».pdf
Õ«ëÞúൡÑÚ¬ñõ¢┐þö¿ÞíÑÕè®